[VIP第1年] 指数:3
[VIP第1年] 指数:3
设备运行时各种可能发生的意外状况,如:控制程序运行异常、系统与编码器之间电气连接的断开、设备故障或断电停机、信号线路干扰...等,都将造成检测运算中位置计数和圈数累加的错误或清零,从而相当于中断了位置测量的进程。因此,一旦出现上述这些情况,就必须在系统恢复时,对编码器所在的位置轴进行原点校准的初始化操作,但这在起重机械操作规程中是不允许发生的,这增加了起重机械设备的不安全性和出事故的概率。而使用多圈绝对值编码器进行位置测量,只要其目标量程(即测量行程)在编码器圈数范围内,设备系统就可以无需进行任何位置计数和圈数累加方面的算法处理,直接引用编码器输出的反馈数据。ENM58mm系列SSI输出,4-20mA输出。上海OCD58-CB0016-C103绝对值编码器

ENX的IXARCPROFINET编码器特征集成了引导装载程序方便客户进行固件升级圆形轴(无尽轴)相邻检测工程师识别呼叫不同速度滤波PROFINET编码器版本V4.0/4.1ENX的IXARCPROFINET编码器可根据用户的需求来进行编程。将该旋转编码器附属的GSDML文件加载入PLC上位机控制软件即可。Modbus是一种由Modbus组织管理的串行协议。它可以基于不同的电气网络和包括Ehernet-TCP/IP在内的协议。编码器的串行接口串行接口使用点对点的布线系统,可用数字接口直接连接数字可编程控制器或微控制器。它们提供良好的速度,高分辨率,灵活的布线和可靠的通信距离可达几百米上海OCD58-CB0016-C103绝对值编码器绝对值编码器不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。

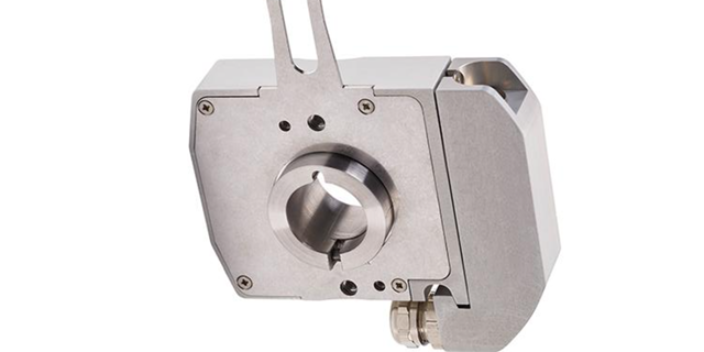
ENX推出58mm系列夹紧同步法兰编码器,可替代同系列进口品牌编码器。例如德国POSITAL博斯特OCD系列,UCD系列型旋转编码器从接通电源的那一刻起就能够提供独特的位置值。即使是在系统没有电源的情况下发生的运动,一旦编码器再次通电,也会转化为准确的位置值。另一个优势是它们有大量的不同型号。绝对编码器可以是单圈或多圈的,具有不同的分辨率和通信接口。用户还可以从数千种机械和连接配置中选择,以满足他们的需要。应用ENX绝对式编码器始终提供可靠的定位,并且从不需要通过校准来提高机器的安全性和效率。其紧凑的尺寸使其成为从医疗设备到工厂自动化等应用的理想选择。食品与饮料不锈钢版本耐化学腐蚀精确的过程监控工业阀门,废水各种接口IP69K等级16位分辨率工厂自动化紧凑的尺寸非常适合改装在比较大速度下可靠石油和天然气ATEX编码器Zone1&21Zone2&。
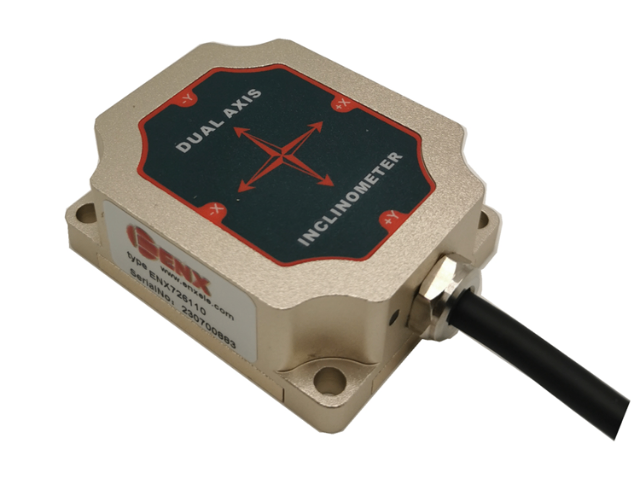
通过将事件触发脉冲的定时与功耗计数电子设备相结合,可以实现韦根供电的计数安全系统。韦根脉冲用作计数器,指示工业门/大门的打开和关闭所涉及的转数。这有助于监控门组件的状况,并有助于确定何时应更换它们以避免在超过其先前已知的使用寿命时发生故障。这种维护周期管理甚至可以在外部供电困难或不利的情况下发生,这意味着韦根传感器可用于为工业门创建能源自主安全系统。医疗保健行业使用的现代设备需要先进的技术来实现精确定位。ENX紧凑型倾角仪可提供准确的测量结果,并可延长设备的使用寿命。ENX线性传感器提供了一种用于跟踪患者台位置的解决方案。对于需要协调定位多个组件的更复杂的应用,HEK08Z102410/3038PPRC编码器ENX.

紧凑型ENM36系列***值4-20mA,0-5V,0-10V输出,NM法兰Ø36mm的紧凑型编码器,可适应狭小空间安装;模拟量4-20mA;0-5V;0-10V输出可选;模拟量AD转换精度高达16bit;零点设置和计数方向设置功能;圈数:4096圈产品尺寸:外径Ø36mm分辨率:比较大单圈13位8192安装方式:实心轴Ø06mm,ø08mm,ø10mm;盲孔ø06mm,ø08mm,Ø10mm通讯类型:4-20mA,0-5V,0-10V紧凑型ENM36系列***值Modbus-RTU输出圈数:4096圈产品尺寸:外径Ø36mm分辨率:比较大单圈13位8192安装方式:实心轴Ø06mm,Ø08mm,Ø10mm;盲孔Ø06mm,Ø08mm,Ø10mm通讯类型:modbus-RTU/RS485法兰Ø36mm的紧凑型编码器,可适应狭小空间安装;ModbusRTU接口,符合RS485通讯标准;多圈***值采用国际**的齿轮组设计。 Profibus系统比较大配置可达126站点。控制系统的连接模块或PC接口卡通常可用来实现主控功能。上海01072-080绝对值编码器
如果需要连更多设备,通过中继器(信号发大器)能连至更多的总线区段。上海OCD58-CB0016-C103绝对值编码器
编码器在欧洲的采用,主要目的之一在于机器安全,估计按照机器安全指令的条文。这种"伪***"恐怕是无法满足要求的,或者至多只能满足低级别的某要求。关于工业机器人中的编码器处理板:工业机器人编码器处理板的主要功能,是处理伺服电机编码器反馈的信号,并将结果发送给上位机,编码器处理板计数时需要外部供电。设备停电后,倘若其它原因动了机器人轴,这个时候,脉冲处理器主板记忆位置所需的供电就来自于电池,位置信号仍然是确定的,下次上电不需要复位。拆掉电池后,编码器处理板不工作,就无法保证位置信息了因此,如果电池板安装在机器人本体上,一般情况下,拔掉机器人的动力线和编码器线,是不需要机器人原点校正的。如果编码器处理板由外部供电,拔掉电缆的时候,同时切断了处理板的电源,那么机器人就需要原点校正了。上海OCD58-CB0016-C103绝对值编码器
文章来源地址: http://dzyqj.chanpin818.com/chuanganqisr/mgyj/deta_19830587.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。