[VIP第1年] 指数:3
[VIP第1年] 指数:3
也能作接收。这里只介绍小型超声波传感器,发送与接收略有差别,它适用于在空气中传播,工作频率一般为23-25KHZ及40-45KHZ。这类传感器适用于测距、遥控、防盗等用途。该种有T/R-40-60,T/R-40-12等(其中T表示发送,R表示接收,40表示频率为40KHZ,16及12表示其外径尺寸,以毫米计)。另有一种密封式超声波传感器(MA40EI型)。它的特点是具有防水作用(但不能放入水中),可以作料位及接近开关用,它的性能较好。超声波应用有三种基本类型,透射型用于遥控器,防盗报警器、自动门、接近开关等;分离式反射型用于测距、液位或料位;反射型用于材料探伤、测厚等。由发送传感器(或称波发送器)、接收传感器(或称波接收器)、控制部分与电源部分组成。发送器传感器由发送器与使用直径为15mm左右的陶瓷振子换能器组成,换能器作用是将陶瓷振子的电振动能量转换成超能量并向空中辐射;而接收传感器由陶瓷振子换能器与放大电路组成,换能器接收波产生机械振动,将其变换成电能量,作为传感器接收器的输出,从而对发送的超进行检测.而实际使用中,用作发送传感器的陶瓷振子也可以用作接收器传感器社的陶瓷振子。浙江罗舸智能科技有限公司为您提供超声波传感器,期待为您!镇江检测金属超声波传感器

在我国的化工厂,坐落着成千上万的储罐,人们在生产生活中经常会用到各种类型的罐体,比如:化工厂的储蓄、铸造工业的浇口杯、锅炉的汽包、蓄水池等。他们的液位、温度、压力等参数测量的准确性、可靠性以及及时性对生产起着关键的作用。通过对罐体液位准确、及时、可靠的测量,可以迅速调节罐中液体的容量,平稳生产的过程。罐体近年来,随着石油化工业的发展,石化部门对罐体自动化计量技术也越来越重视。液位作为自动计量的一个重要参数,它的测量准确与否,起着十分重要的作用。要想知道储量的多少,必须进行测量,以监控生产过程,保证设备安全稳定运行,随时对罐区中的储罐的储量进行动态监控,在铸造工业中,浇注过程中,在往浇口杯内装入熔金属液位,如何实现测量浇口杯内的液位,进而控制浇包底部阀门开度,将直接影响到铸件质量;锅炉在运行过程中,汽包水位是其安全运行的指标之一,其测量与监视对锅炉的安全运行极为重要。水位过高,会影响汽水分离装置的汽水分离效果,是锅炉出口饱和和蒸汽的湿度增大,含盐量增多,造成过热器和汽轮通流部分结垢,天长日久容易引起过热器管壁超温甚至爆表,以及是汽轮机效率降低,轴向推力增大;当水位严重过高时。日照防水超声波传感器浙江罗舸智能科技有限公司致力于提供超声波传感器,竭诚为您。

2)噪音虽然多数超声波传感器的工作频率为40-45KHz,远远高于人类能够听到的频率。但是周围环境也会产生类似频率的噪音。比如,电机在转动过程会产生一定的高频,轮子在比较硬的地面上的摩擦所产生的高频噪音,机器人本身的抖动,甚至当有多个机器人的时候,其它机器人超声波传感器发出的声波,这些都会引起传感器接收到错误的信号。这个问题可以通过对发射的超声波进行编码来解决,比如发射一组长短不同的音波,只有当探测头检测到相同组合的音波的时候,才进行距离计算。这样可以有效的避免由于环境噪音所引起的误读。(3)交叉问题交叉问题是当多个超声波传感器按照一定角度被安装在机器人上的时候所引起的。超声波X发出的声波,经过镜面反射,被传感器Z和Y获得,这时Z和Y会根据这个信号来计算距离值,从而无法获得正确的测量。解决的方法可以通过对每个传感器发出的信号进行编码。让每个超声波传感器只听自己的声音。实验原理超声测距传感器实验环境由PC机(安装有WindowsXP操作系统、)、J-Link-ARM仿真器、NXPLPC2378实验节点板、超声测距传感器、实验模块和LCD显示实验模块组成,如图11所示。图11传感器实验环境本实验所使用实物规格图如图12所示,实物图如图13所示。
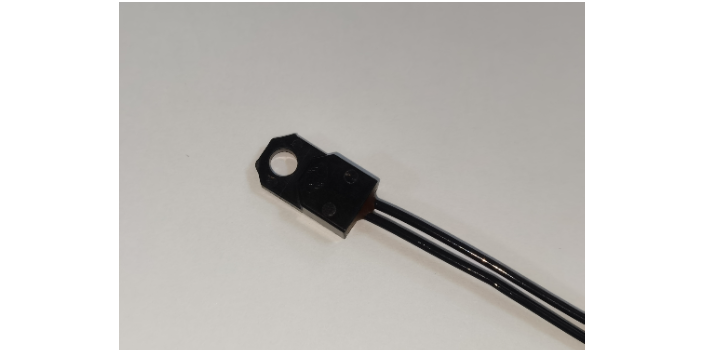
灵敏度也**高。(2)工作温度。由于压电材料的居里点一般比较高,特别时诊断用超声波探头使用功率较小,所以工作温度比较低,可以长时间地工作而不产生失效。医疗用的超声探头的温度比较高,需要单独的制冷设备。(3)灵敏度。主要取决于制造晶片本身。机电耦合系数大,灵敏度高;反之,灵敏度低。超声波测距一体模块HC-SR04(1)模块性能如图2所示,HC-SR04模块性能稳定,测度距离精确,能和国外的SRF05、SRF02等超声波测距模块相媲美。模块高精度,盲区(2cm)超近,**大识别距离为300cm。图2HC-SR04模块实物图如图3所示,系统的工作是由软件和硬件的配合过程。先由嵌入式微处理器使555使能端置1,继而555送出40KHz频率的方波信号,经过压电换能器(超声波发射头)将信号发射出去,即发射超声波,同时该时刻启动定时器开时计时。该信号遇到障碍物反射回来在此称为回波。同时,压电换能器(超声波接收头)将接收的回波及接收超声波,通过信号处理的检波放大,通过三级放大后再送到比较器进行比较,输出比较电压,输出电压经过三极管以后,使之电压与嵌入式微处理器的I/O口相匹配**后送至处理器处理。图3超声波测距原理框图。超声波传感器,就选浙江罗舸智能科技有限公司,让您满意,有想法可以来我司咨询!

一种是基于单片机或者嵌入式设备的超声波测距系统,一种是基于CPLD(ComplexProgrammableLogicDevice)的超声波测距系统。如图1所示,实验采用第一种方案,利用嵌入式设备编程产生频率为40KHz的方波,经过发射驱动电路放大,使超声波传感器发射端震荡,发射超声波。超声波经发射物反射回来,由传感器接收端接收,再经过接收电路放大、整形。以嵌入式微**的超声波测距系统通过嵌入式设备记录超声波发射的时间和反射波的时间。当收到超声波的反射波时,接收电路输出端产生一个跳变。通过定时器计数,计算时间差,就可以计算出相应的距离。图1超声波测距原理超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。首先,超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为C=340m/s,根据计时器记录的时间T秒,就可以计算出发射点距障碍物的距离L,即:L=C×T/2。这就是所谓的时间差测距法。由于超声波也是一种声波,其声速C与温度有关。浙江罗舸智能科技有限公司致力于提供超声波传感器,有想法的可以来电咨询!日照超声波传感器厂家
超声波传感器,就选浙江罗舸智能科技有限公司,让您满意,欢迎您的来电!镇江检测金属超声波传感器
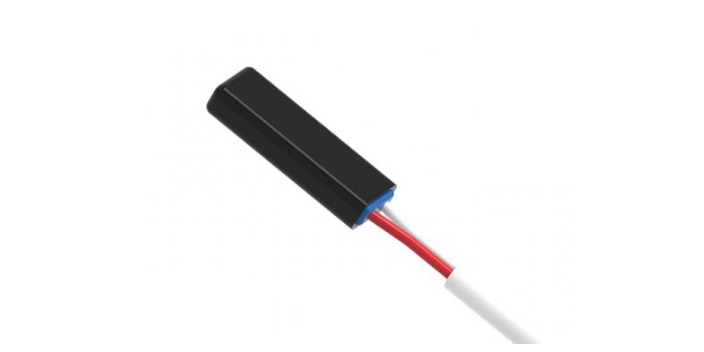
2)产品应用领域机器人避障、物体测距、液位检测、公共安防、停车场检测。(3)主要技术参数(4)接线方式及工作原理接线方式:VCC、trig(控制端)、echo(接收端)、GND。如图4所示,超声波传感器基本工作原理如下:采用IO口TRIG触发测距,给大于10us的高电平信号;模块自动发送8个40KHz的方波,自动检测是否有信号返回;有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340m/s))/2。图4传感器的方向图(5)控制方式本模块使用方法简单,通过嵌入式微处理器控制口发一个10us以上的高电平,启动超声波传感器模块发出8个40KHz的周期电平。然后开启定时器,再延时100us左右以避免发射探头的余振的干扰。接着通过在while循环中查询外部中断是不是已经捕获到回波信号,一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到接收到的回响信号的时间间隔就可以计算得到距离。如图5所示为超声测距模块的时序图,根据时序图,可以知道,回响信号的高电平就是我们用来测量距离的重要指标,通过距离与速度和时间的关系,从而求得相应的距离。镇江检测金属超声波传感器
文章来源地址: http://dzyqj.chanpin818.com/chuanganqisr/qtcgq/deta_21336180.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。