[VIP第1年] 指数:3
[VIP第1年] 指数:3
无人机被广泛应用于目标跟踪,其机动灵活的特点对地面的被跟踪对象而言简直就是降维打击。搭载摄像头以及跟踪板卡等设备后,无人机可以实现自主飞行,然后通过植入高精度的AI目标跟踪算法,就能够分析摄像头范围内的物体,通过AI对特征的进一步提取分析,就能够单独识别出目标物体形状,并锁定其位置。这种技术可以用于众多领域的信息侦查、监视、打击等任务,比传统的人工模式更安全更高效。要想实现这样的技术,可以通过在无人机中安装光电吊舱,然后在吊舱中植入高性能的AI图像处理板,通过算法的赋能就能够实现。慧视RK3399PRO图像跟踪板支持图像识别模块识别目标(人、车)。成都自主识别图像识别模块板

YOLO系列算法是目标识别领域很重要的技术之一,因为性能强大、消耗算力较少,一直以来都是实时目标检测领域的主要范式。该框架被***用于各种实际应用,包括自动驾驶、监控和物流等行业的目标识别。自今年2月YOLOv9发布以后,近期,清华又推出了YOLOv10,作为计算机视觉领域的突破性框架,具备实时的端到端目标检测能力,通过提供结合效率和准确性的强大解决方案,延续了YOLO系列的传统。据悉,YOLOv10在各种模型规模上都实现了SOTA性能和效率。例如,YOLOv10-S在COCO上的类似AP下比RT-DETR-R18快1.8倍,同时参数数量和FLOP大幅减少。与YOLOv9-C相比,在性能相同的情况下,YOLOv10-B的延迟减少了46%,参数减少了25%。成都轨迹图像识别模块方法振动测试是否通过正是确定板卡能否在这样的环境下正常完成工作的关键手段。

工业4.0就是无人作业的天下,各行各业都在进行无人化改造,农业领域也不例外。近年来随着政策的不断导向,我国已经成功建立了31个无人农业作业实验区。这些无人农业作业试验区覆盖水稻、玉米、小米等14种作物,累计投入智能农机和系统62万台(套),智能化作业面积达到1.7亿亩。综合抽样统计,作业效率提升60%、人工减少50%、土地利用率在95%以上。这些无人农业区利用无人机、无人车进行作物的播撒、浇灌、施肥等一系列操作,而无人设备要想实现这些功能要么是人工的远程精细操控,要么就是靠图像处理来实现完全的自动化。后者通过在无人设备上加装高性能的AI图像处理板,这些图像处理板在算法的赋能下,能够实现精细的目标识别和检测,例如无人机,在无人机上安装慧视光电推出的微型双光吊舱,吊舱内置图像处理板,无人机在起飞后能够自动识别哪些是作物哪些是其他物体。
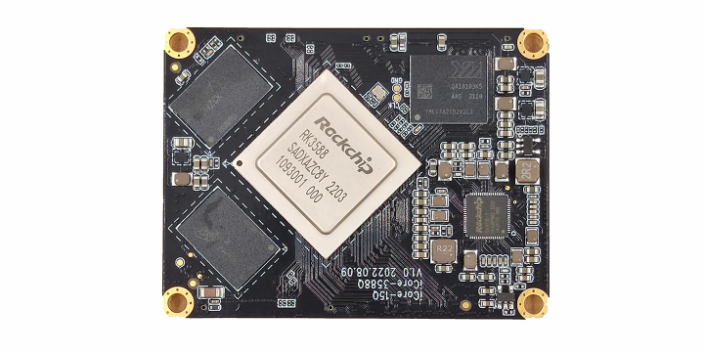
成都慧视光电技术有限公司推出的SpeedDP是针对AI零基础用户的低门槛AI开发平台,提供从数据标注、模型训练、测试验证到RockChip嵌入式硬件平台模型部署的可视化AI开发功能。SpeedDP功能简洁、上手快,是当下进行AI深度学习训练的重要的工具。而且目标识别检测领域,成都慧视开发的高性能Viztra-HE030图像处理板,可以通过四大四小处理器高达6.0TOPS的算力,精细分析识别到的物体,区分作物和杂草,进而为机器人提供正确的信息,辅助除草。远海牧场监控可以加装慧视RK3588图像处理板。
随着无人机在城市管理领域的大规模应用,采用无人机追踪地面车辆,然后配合地面拦截,成为一道风景线。让无人机搭载光电吊舱起飞,就能够通过无人机实现视频实时传输,远距离追踪车辆,实时上传记录位置,帮助地面执勤提升拦截效率。慧视VIZ-YWT201微型双光吊舱,集成了可见光摄像机、红外热像仪等传感器,能够对地面车辆进行昼夜观察、识别、捕获和跟踪,并及时上报目标的图像和坐标信息。除此之外,无人机还可以实现智能化追踪。慧视光电的RV1126是什么样的板卡?成都自主识别图像识别模块板
RK3588是小型化纯国产板卡。成都自主识别图像识别模块板
AI的出现可以很好地解决这个问题。针对于这样的环境需求,成都慧视推出了基于瑞芯微平台的深度学习算法开发平台SpeedDP,它是一款入门级的AI开发平台,提供从数据标注、模型训练、测试验证到RockChip嵌入式硬件平台模型部署的可视化AI开发功能,提供丰富的算法参数设置接口,满足不同用户业务场景的定制化需求。经过前期的需求分析,大量的数据训练,SpeedDP就能够生成适合行业需求的训练模型,通过这个模型,就能不断进行自动化的图像标注。成都自主识别图像识别模块板
文章来源地址: http://dzyqj.chanpin818.com/chuanganqisr/sjtxcgq/deta_22984197.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。