[VIP第1年] 指数:3
[VIP第1年] 指数:3
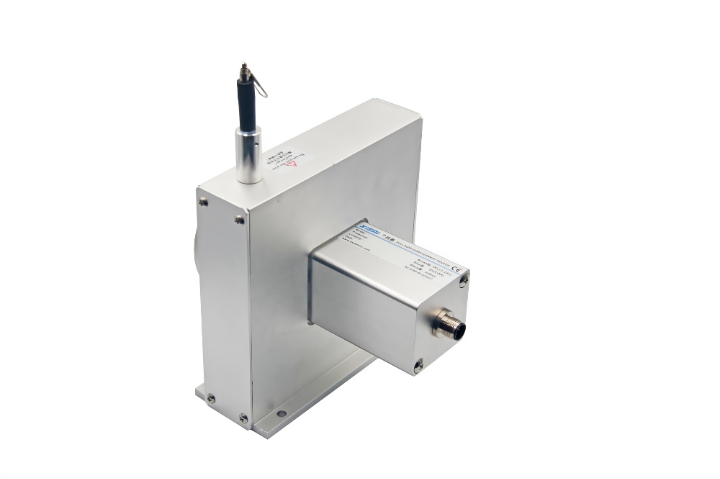
如图1至图3所示,为本实用新型光谱共焦位移传感器系统,传感器系统由卤素灯光源1、Y型光纤2、光谱共焦透镜组3、共焦小孔6和光谱仪5组成,卤素灯光源1连接Y型光纤2,卤素灯光源1的光谱波段范围为360nm~2500nm,光谱仪5通过共焦小孔6连接Y型光纤2-端,型光纤2另一端连接光谱共焦透镜组3,光谱共焦透镜组3包括盒盖、盒体7、两个双凸球面镜9、套筒12和一个弯月透镜11,盒体7内设置有光路通道8、限位槽13和透光孔10,光路通道8位于限位槽13和透光孔10之间,光路通道8上从左往右依次设置有两个相互平行的一号卡槽和一个第二卡槽,两个双凸球面镜9分别限位在两个一号卡槽内,两个双凸球面镜9的凸面侧朝内对称设置,两个双凸球面镜9之间的间距为2.5~5.5mm,弯月透镜11限位在第二卡槽内,位于中间的双凸球面镜与弯月透镜之间的间距为3.5~6.0mm,Y型光纤2通过SMA905插头4与盒体7相连,套简12限位在限位槽13内,且与限位槽13相匹配,套筒12上设置有用于光纤连接的螺纹孔。该传感器适用于高分辨率成像系统,如光学显微镜和扫描电子显微镜中的位移测量。苏州高精度光谱共焦位移传感器
在探头壳体的内侧壁上固定设置有反光镜,所述反光镜用于反射所述半透半反光学镜所发出的反射光,即反光镜对半透半反光学镜所反射的光线进行再次反射,所述接收光纤入光端位于所述反光镜的上方,通过反光镜所反射的反射光进入到接收光纤的入光端,再通过接收光纤传递反射光到光谱仪。本实施例中采用的入射光纤和接收光纤的入光端和出光端的用于导光的纤芯直径均为微米级,直径通常为50-100毫米,导光直径非常小,当反射光的焦点落在接收光纤的纤芯之外时,无法对反射光进行接收,而需要测量的相应波长的反射光可以顺利通过接收光纤的纤芯,被顺利接收和传导,实现对不同波长的反射光进行选择和物理过滤,因此可以通过缩小光纤的纤芯直径来使采样信号更锐利,从提高采样信号的信噪比和测量精确度。苏州高精度光谱共焦位移传感器该传感器的测量范围受到光谱共焦显微镜成像范围的限制。
光谱共焦位移传感器系统中的光谱仪还包括有用于对反射光进行准直调整的准直透镜组,准直透镜组设置在接收光纤的出光端与所述棱镜组之间。机壳设置有两层,聚焦透镜组位于所述机壳的上层,感光元件位于机壳的下层,聚焦透镜组与感光元件的光路之间设置有用于转变光线传播方向的光线转向镜组,光线转向镜组包括有上反光镜,设置在上反光镜下方位置的下反光镜,光线转向镜组用于使从上层的聚焦透镜组射出的光线聚焦到下层的感光元件上。
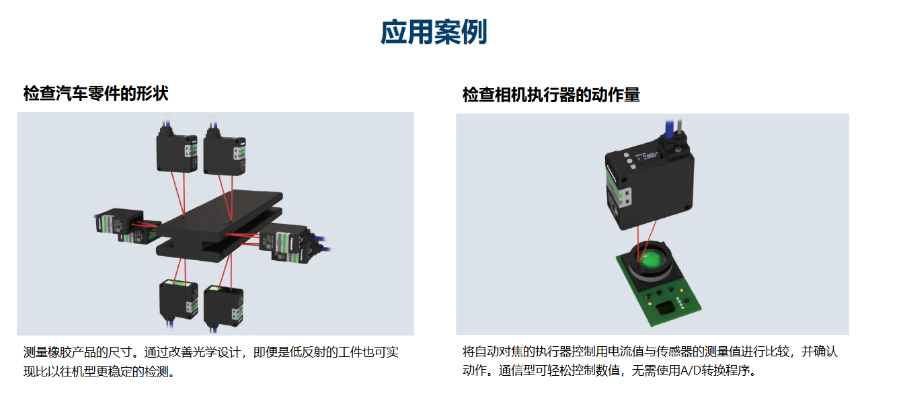
本发明提供一种光谱共焦传感器和测量方法。该光谱共焦传感器包括:光源部,用于射出具有不同波长的多个光束;多个光学头,用于将从所述光源部射出的所述多个光束会聚于不同的聚焦位置处,并且射出在所述聚焦位置处被测量点反射的测量光:分光器,其包括:线传感器,以及光学系统,其包括用于使从所述多个光学头射出的多个测量光束发生衍射的衍射光栅,并且向所述线传感器的不同的多个受光区域射出通过所述衍射光栅所衍射的所述多个测量光束:以及位置计算部,用于基于所述线传感器的所述多个受光区域各自的受光位置来计算作为所述多个光学头的测量对象的多个测量点的位置光谱共焦位移传感器需要专门的光谱共焦显微镜来实现测量。
发光件和导光光纤的入光端之间,固定设置有滤光片,滤光片固定设置在发光件和导光光纤之间,滤光片用于过滤红外线,以减少光热效应高的红外线在传递到探头壳体的位置时,使探头壳体发热变形而影响探头精度。探头壳体的侧壁上开设有沉孔,连接导光光纤的出光端的插槽开设在沉孔底部,且导光光纤的出光端与沉孔的底部的插槽可拆卸连接;这样,通过沉孔的设置,在探头壳体上形成对导光光纤连接位进行避让,避免使用者在使用过程中触碰到导光光纤,从而影响影响导光光纤,或损伤导光光纤与探头壳体的连接位。该传感器可被应用于微纳制造、生物医学和半导体制造等领域中的精密测量。广州直销光谱共焦位移传感器
它使用光谱共焦技术来测量物体的微小位移,能够达到亚微米级的高精度。苏州高精度光谱共焦位移传感器
这样,通过棱镜组对接收光纤的出光端发出的多色光进行色散,色散后的光通过聚焦透镜组进行聚焦,使焦点位于感光元件上,通过感光元件与控制电路电性连接,从而实现电信号输出,即对反射光进行量化处理,量化后的光波在光谱仪上产生一个光谱波峰,光谱曲线的峰值位置与聚焦于被测物体表面的波长产生对应关系;光谱仪将波长、被测物体的位移和光谱波峰位置三者建立对应关系后进行分析,通过波光谱波峰位置反推出被测物体的位移,实现使用光谱共焦原理测量位移的过程。本实施例采用棱镜组进行色散,具有较小的光能量损失。苏州高精度光谱共焦位移传感器
文章来源地址: http://dzyqj.chanpin818.com/chuanganqisr/ycgq/deta_21350599.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。