[VIP第1年] 指数:3
[VIP第1年] 指数:3
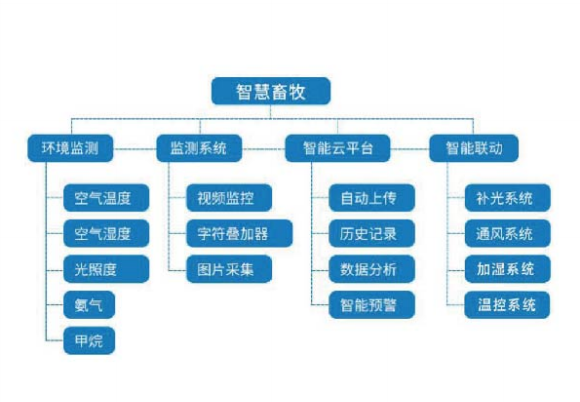
巡检无人机返航回到巡检子平台的无人机组机位中进行状态维护,巡检子平台上传巡检异常信息至巡检总系统,巡检总系统通过登录巡检子平台可详细查看异常状态及异常信息。与现有技术相比,本发明的有益效果是:本发明通过无人机与巡检系统的结合,通过区域划分和进一步精细化确定巡检区,配合无人机自动巡检,新疆多旋翼无人机定制组装,巡检大部分可自动完成,减少人工巡检且一些地形不便或较高的电力设备所在区域可以通过无人机巡检得到其设备信息,新疆多旋翼无人机定制组装,节省人力资源,降低巡检难度,新疆多旋翼无人机定制组装,通过编码及地理位置与所回传电力设备信息绑定,使得存在目标异常时可以及时发现,无需投入图像分析人员及图像处理设备,降低了自动巡检成本,提高了整体巡检任务的工作效率。附图说明为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图**是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。图1为本发明系统结构示意图;图2为本发明巡航流程示意图;图3为本发明编码规则示意图;图4为本发明电子巡航地图示意图。具体实施方式下面将结合本发明实施例中的附图。
1312-静压孔;1313-总压导出管;1314-静压导出管;1315-对准柄;d-测头的直径;d-总压孔的直径;132a、132c-压力计;133a、133c-支撑管;14a、14b、14c-障碍物检测装置;20a、20b、20c-动力装置;θ-夹角;p1、p2-皮托管的位置;α-比较大飞行倾角;r-气流影响区域;w-风向;w1-平行于巡航航向的分量;w2-垂直于巡航航向的分量;c-巡航航向;e-实际航向。具体实施方式以下,将参照附图来描述本公开的实施例。但是应该理解,这些描述只是示例性的,而并非要限制本公开的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本公开的概念。本公开一实施例提供了一种无人机的控制方法,如图1所示,该控制方法包括以下步骤:步骤s101:通过向无人机发送返航指令,使无人机执行返航动作,返回动作至少包括一巡航阶段。如图2所示,返航动作包括:爬升阶段s1、巡航阶段s2以及降落阶段s3,巡航阶段s2包括一大风返航阶段s21。爬升阶段包括:返航准备、强制上升、航向对齐、自动上升等阶段。无人机首先执行刹车悬停操作,以做好返航准备。当无人机处于悬停状态、或者其航速小于预设航速、或者执行刹车悬停操作的时间已经超过预设时间时。
控制无人机由***模式切换至其他模式(非第二模式),其中,无人机处于其他模式,无人机不会跟随云台200的转动而运动。(2)云台200与飞行控制器100之间的通信链路故障参见图5,确定云台200处于特定工况可包括但不限于以下步骤:步骤s501:确定***通信链路1处于断开状态;步骤s502:确定第二通信链路2处于连接状态;步骤s503:确定云台200处于转动状态。其中,***通信链路1和第二通信链路2可参见上述实施例的描述,此处不再赘述。在本实施例中,步骤s501、步骤s502和步骤s503可同时执行,也可按照先后顺序执行,如步骤s501->步骤s502->步骤s503,或者,步骤s501->步骤s503->步骤s502,或者,步骤s502->步骤s501->步骤s503,或者,步骤s502->步骤s503->步骤s501,或者,步骤s503->步骤s501->步骤s502,或者,步骤s503->步骤s502->步骤s501。***通信链路1处于断开状态可能由于硬件损坏导致***通信链路1长久断开,也可能由于其他原因导致***通信链路1暂时断开。在本实施例中,飞行控制器100仍然能够接到云台200发送的数据,但云台200无法接收到飞行控制器100发送的数据。此时,若无人机处于***模式。
文章来源地址: http://dzyqj.chanpin818.com/dzxmhz/deta_4301725.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。