[VIP第1年] 指数:3
[VIP第1年] 指数:3
3D相机照射的原理:一般3D立体相机采用的基本原理是光学三角法:半导体激光器①被镜片②聚焦到被测物体⑥。反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离。按照测量原理,激光位移传感器分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,福州Gocator26303D相机矫正,而激光回波分析法则用于远距离测量,下面分别介绍激光三角测量原理和激光回波分析原理,福州Gocator26303D相机矫正。1.激光位移传感器原理之激光三角测量法原理激光发射器通过镜头将可见红色激光射向被测物体表面,福州Gocator26303D相机矫正,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出激光位移传感器和被测物体之间的距离。 一起感受Gocator三维智能传感器的魅力。福州Gocator26303D相机矫正
3D线激光轮廓传感器采用激光三角反射原理。首先使用一束激光照射到被测物体表面,反射光经过光学透镜组在感光元件表面形成光斑,不同高度的表面反射形成的光斑位置各不相同。如下图所示,当被检测表面偏高时,测量激光光斑位置会右移;反之,如果被检测表面偏低时,测量激光光斑位置会左移。3D线激光轮廓传感器采用的不是点激光光源,而是一条激光线,测量光激光斑也是一条线,所以俗称线激光。线激光还可以面扫描,快速形成3D轮廓。南京共面度检测3D相机的价格LMI 3D方案助力BGA封装焊接质量检测。
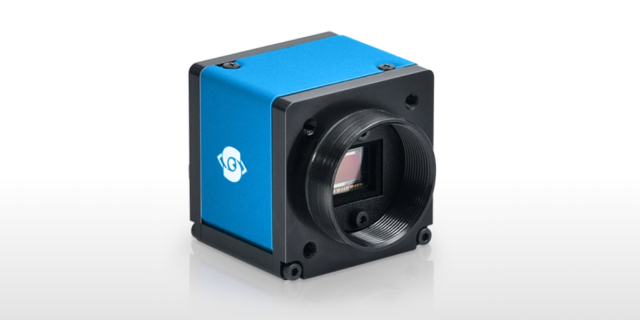
3D相机 LMI GOCATOR2520传感器类型:线激光轮廓传感器特点:Gocator2520是目前市面上超快、紧凑的三维智能传感器。专为高性能微小零部件检测而设计,实现高速度扫描(高达10kHz),超高X方向分辨率(8μm)。采用两百万像素的高速成像芯片,专属优化的光学设计和蓝色激光,意味着扫描高反光物体表面的时候可以获得更非常不错的数据,并实现高重复性。■出厂前预校准,开箱即用■X方向分辨率达8μm■每秒10,000个轮廓,包括三维测量■通过网页浏览器或SDK设置和控制■内置测量工具,无需任何编程■可扩展性,可用GDK和GOMAX
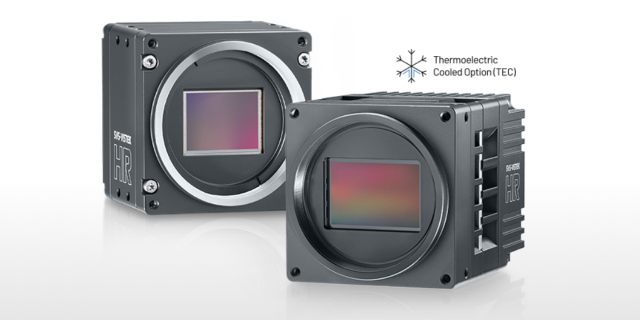
LMIGocator2600系列4K+分辨率3D智能线激光轮廓传感器:产品介绍:业内好于的Gocator3D智能传感器系列新加入4K+分辨率线激光轮廓传感器,可测量更细微特征或更大目标物。定制的光学器件和强大的900万像素成像芯片为每个轮廓提供4200个数据点,为宽视野应用实现高分辨率3D扫描和检测,例如电池检测、食品加工、家居建材、汽车、橡胶和轮胎生产以及常见的工厂自动化等应用。性能参数:•900万像素成像•每个轮廓4200个数据点,用于高分辨率测量•视野为71mm时,X方向分辨率高达•优宽X方向视野可达2米(X方向分辨率)•内置测量工具和I/O连接•支持多传感器校准和组网产品亮点:以4K分辨率测量更细微的特征。Gocator2600系列线激光轮廓传感器配备了定制的光学器件,是LMI新一代高精度的智能相机。每个轮廓4200个数据点,为业内好于的Gocator3D智能传感器家族提供了4K分辨率线激光轮廓分析能力,超高X方向分辨率可生成高分辨率轮廓和点云数据,适用于测量各种微小特征。 Gocator® 智能 3D 线激光轮廓传感器获得UR+认证,助力自动化升级。
3D相机的精度是指什么?跟重复精度有什么区别?线性度的定义?经常听到有人问“.3D相机的精度是指什么?跟重复精度有什么区别?”“3D相机线性度的定义?”等,现在小编带大家一次性搞懂这几个定义!X分辨率=视野宽度/点数●点与点之间沿着激光线方向的水平间距●取决于3D相机沿着视野方向上对应的imager的像素个数对宽度精度很重要Z向线性度以被测输入量处于稳定状态为前提。在规定条件下,3D相机校准曲线与拟合直线间的比较大偏差(ΔZmax)与满量程输出(Z,景深)的百分比,称为线性度。δ=ΔZmax/Z*100%Z分辨率和重复性分辨率:是指3D相机可感受到的被测量值的由此小变化的能力●稳定的测量环境●标准量块●多次重复测量重复性整个视野量程范围内,测同一物体,多次测量值的变动大小另一种说法叫重复精度,注意区别于精度!重复性的目的只是要获知设备的变异性。精度Precision:仪器的值与理论值之间的比较大差值,由.3D激光视觉传感器的基本误差极限和影响量(如温度变化、湿度变化、电源波动、频率改变等)引起的改变量极限确定。精确度,准确(性);数据稳定性线性度Linearity:是描述.3D相机静态特性的一个重要指标,以被测输入量处于稳定状态为前提。在规定条件下。
Gocator优势:国内优越的算法工程师团队,使用我们的GDK工具,根据不同的客户样件,实时优化图像算法。宁波Gocator26503D相机测量
LMI Gocator 2400和2500系列3D激光传感器。福州Gocator26303D相机矫正
三维点提取:此处先使用 R0I3~15 三维点提取,以一簇高度拟合,经过较平算法得到一个平面,以之为基准面。为实现校平提供基准面数据,3-15的ROI提取高度,ROI1的三维校平才算实现,这里也是有分割高度的。右键测试图片,如果分割高度正确,那么就会显示出ROI框子,如果没有显示就一定没有分割正确。可以从-15~+15开始往某个区域压缩,实验出来大致的区域就可以了比如-2~2,测试一下,点击属性的输出高度,可以看到值。形成基准面,每个 ROI 的输出在可以看到是有很多点的,由此终进行了中值筛选。福州Gocator26303D相机矫正
苏州虔坤图像技术有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的电子元器件中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身不努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同苏州虔坤图像技术供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
文章来源地址: http://dzyqj.chanpin818.com/jcdl(ic)/zxjic/deta_16244773.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。