[VIP第1年] 指数:3
[VIP第1年] 指数:3
一体式三维智能传感器:产品介绍Gocator2430和2440型号扩展了Gocator2400产品系列,专门针对橡胶和轮胎的应用,以及扫描中等大小的物体,如电子元器件、汽车零部件和产品包装。采用优近新200万像素成像技术和新的处理器,可实现更高的扫描速度和优越的重复性。•达到GOCATOR2300产品系列速度和灵敏度的2倍,苏州3D相机评测,扫描速度高达5kHz•可通过网页浏览器或SDK进行设置和控制•内置测量工具,苏州3D相机评测,苏州3D相机评测,无需任何编程•可扩展性,可用GocatorGDK及ACCELERATOR苏州虔坤图像技术有限公司为您提供3D相机 ,期待您的光临!苏州3D相机评测
用于长距离检测,因而逐渐取代了拉线位移传感器,在工业自动化、交通、钢铁 、建筑、码头等需要进行自动距离位移测量和位置控制中应用。它可以快速、准确的测量到目标地距离,测量结果可以通过各种接口传输到设备上,以便进行检测、控制等应用,同时激光位移传感器的控制也可通过计算机或其他与其相连的设备来完成。激光位移传感器可以测量位移、厚度、振动、距离、直径等精密的几何测量。激光有直线度好的优良特性,同样激光位移传感器相对于我们已知的超声波传感器有更高的精度。但是,激光的产生装置相对比较复杂且体积较大,因此会对激光位移传感器的应用范围要求较苛刻。苏州3D相机评测苏州虔坤图像技术有限公司力于提供3D相机 ,有想法可以来我司咨询。
3D线激光轮廓传感器采用激光三角反射原理。首先使用一束激光照射到被测物体表面,反射光经过光学透镜组在感光元件表面形成光斑,不同高度的表面反射形成的光斑位置各不相同。如下图所示,当被检测表面偏高时,测量激光光斑位置会右移;反之,如果被检测表面偏低时,测量激光光斑位置会左移。3D线激光轮廓传感器采用的不是点激光光源,而是一条激光线,测量光激光斑也是一条线,所以俗称线激光。线激光还可以面扫描,快速形成3D轮廓。
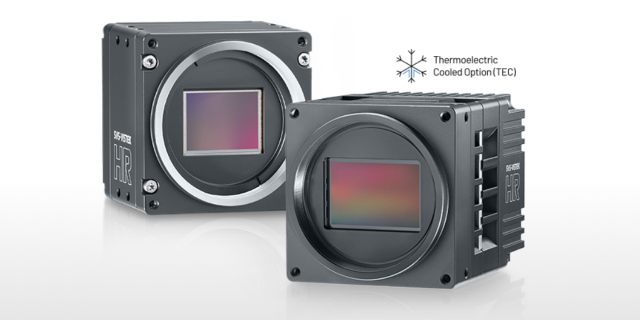
超高分辨率3D激光线轮廓传感器 Gocator 2400传感器设计用于100%检查具有挑战性的目标,例如小型电子部件上的微观特征,以及高速在线应用中的深色材料,如轮胎胎面/侧壁和橡胶板。 200万像素成像仪。每个配置文件分辨率高达1940点视场(FOV)高达194 mm测量范围高达210 mm 概要参数 型号24102420X方向分辨率 (mm)0.00580.014Z方向分辨率 (mm)0.00110.0018视野 (mm)10-1027-32间隙距离 (mm)19.060.0范围 (mm)625激光蓝色蓝色超高分辨率3D激光线轮廓传感器 Gocator 2400传感器设计用于100%检查具有挑战性的目标,例如小型电子部件上的微观特征,以及高速在线应用中的深色材料,如轮胎胎面/侧壁和橡胶板。 200万像素成像仪。每个配置文件分辨率高达1940点视场(FOV)高达194 mm测量范围高达210 mm 苏州虔坤图像技术有限公司是一家专业提供3D相机 的公司,期待您的光临!
3D相机用于定位抓取,眼在手中(eye-in-hand)具有这种配置的系统相机通常将安装在机器人的末端执行器上或附近。例如,在测量类应用中我们通常将相机安装在机器人法兰盘上,而在定位拾取类应用中我们通常将相机和夹爪组成一个模块安装在法兰盘上。这种配置的优点是可以根据应用需要改变相机的拍摄位置或方向,例如,我们可以控制机器人移动到不同的位置拍到更大或更小的FOV。也可以从多个方向拍摄被摄物,获得被摄物更完整的点云数据。还可以通过改变拍摄方向缓解镜面类被摄物表面容易过曝的问题。缺点1相机安装在机器人上增加了运动过程中碰撞相机的风险,需要仔细规划机器人的运动路径。缺点2在拾取类应用中当机器人拾取物体后在向放置点的运动的过程中相机无法拍摄图像,相比于“眼在手中”配置工作周期更长。缺点3在拾取类应用中,由于相机需要安装在机器人上会占用机器人的有效载荷。苏州虔坤图像技术有限公司是一家专业提供3D相机 的公司,有想法可以来我司咨询!杭州Gocator25303D相机建模
苏州虔坤图像技术有限公司为您提供3D相机 ,有想法的可以来电咨询!苏州3D相机评测
3D相机线激光传感器技术原理(二):采取三角测量法的激光位移传感器比较高线性度可达1um,分辨率更是可达到。比如ZLDS100类型的传感器,它可以达到,,,适应恶劣环境。激光位移传感器采用回波分析原理来测量距离以达到一定程度的精度。传感器内部是由处理器单元、回波处理单元、激光发射器、激光接收器等部分组成。激光位移传感器通过激光发射器每秒发射一百万个激光脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回至接收器所需的时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均输出。即所谓的脉冲时间法测量的。激光回波分析法适合于长距离检测,但测量精度相对于激光三角测量法要低,由此远检测距离可达250m。苏州3D相机评测
文章来源地址: http://dzyqj.chanpin818.com/jcdl(ic)/zxjic/deta_19628849.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。