[VIP第1年] 指数:3
[VIP第1年] 指数:3
Gocator2350传感器类型:线激光轮廓传感器特点:Gocator2350三维智能传感器专门为满足工厂车间恶劣运行环境而设计。其使用的便利性和设计的多样性为用户节约成本的同时并极大的提高了生产效率。预先校准过可扫描微米级的细节高速低延迟通过网页浏览器设置和控制内置测量工具,无需用户编程开源SDK,福州Gocator25303D相机设置。 3D传感器解决方案优势扫描速度高达5kHz缓冲、实时处理信息确保没有数据丢失出厂前预校准,福州Gocator25303D相机设置,开箱使用即可直接提供测量数据»提供优化的曝光设置够轻松设置执行阈值易于集成使安装调试更迅速,福州Gocator25303D相机设置、系统成本更低苏州虔坤图像技术有限公司为您提供3D相机 ,有想法的不要错过哦!福州Gocator25303D相机设置
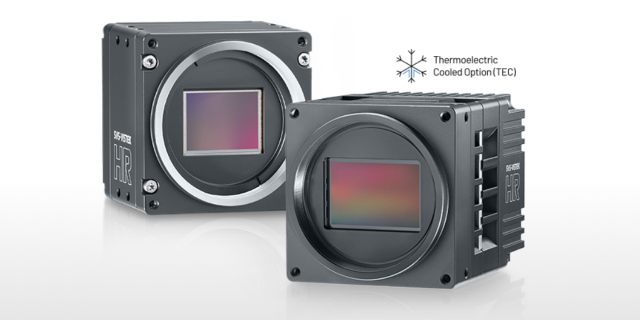
3D智能线激光轮廓传感器GOCATOR 2670参数介绍:型号2670激光轮廓点数4200扫描速度(kHz)0.3-5Z方向线性度(+/-%ofMR)0.050X方向分辨率(μm)(轮廓线数据间隔)67.0-197.0Z方向重复性(μm)3.0安装净距离(CD) (mm)495测量范围MR (mm)1060视野(FOV)(mm)272-817尺寸(mm)55x105X280重量(kg)2.12激光等级2,3R,3B(蓝色,405nm)可定制型号,激光等级以及包装。请联系苏州虔坤图像技术有限公司,获取更多信息。规格说明基于标准安全等级的激光。Z方向线性度和Z方向重复性会随着激光安全等级的改变而变化。以下规格适用于全部GOCATOR 2600系列产品数据接口GigE千兆以太网输入差分编码器、激光安全控制器、触发器输出2x数字型号输出福州Gocator25303D相机设置苏州虔坤图像技术有限公司力于提供3D相机 ,有想法的可以来电咨询!
对应选择IO卡输入的端口号,依次排列,输入只能观察IO卡的输入信号是否有效,有效的信号,端口会有明显的颜色变化,输入对应的功能在输入端口内部设置。输出:对应IO卡的输出的端口号,可以在停止状态强制输出信号,点击强制的点位,可以直接输出信号。检测对象分2D、3D两块内容,因3D也会引用大量的2D算子,本手册从通用流程以及通用算法开始描述。通用算法:绘制ROI框口、添加算法、结果判定。任意位置,点击左键,然后拉伸,形成一条带箭头方向的直线 ROI,并点击右键完成绘制。
激光等级以及包装。请联系苏州虔坤图像技术有限公司,获取更多信息。规格说明基于标准安全等级的激方向线性度和Z方向重复性会随着激光安全等级的改变而变化。以下规格适用于全部GOCATOR 2600系列产品数据接口GigE千兆以太网输入差分编码器、激光安全控制器、触发器输出2x数字型号输出,RS485串口(115kBaud)输入电压(功率)+24 到 +48 VDC (15 瓦); 波动范围: +/- 10%外壳铝合金全封闭机身,IP67防护等级运作温度0 到 50°C存储温度-30 到 70 °C抗震性频率10-55 Hz,X、Y和Z三个方向上1.5 mm双向振幅,每个方向持续2小时抗冲击性15 g, 半正弦冲击,周期11 ms,从X,Y和Z三个方向的正负方向冲击扫描软件基于浏览器的图形界面和开源SDK(软件开发包)实现参数设置和三维数据实时可视化。 提供开源SDK、本地驱动以及支 持标准工业协议方便与用户应用、第三方图像处理软件、机器人和PLC集成。苏州虔坤图像技术有限公司力于提供3D相机 ,竭诚为您服务。
3D相机 LMI GOCATOR2520传感器类型:线激光轮廓传感器特点:Gocator2520是目前市面上超快、紧凑的三维智能传感器。专为高性能微小零部件检测而设计,实现高速度扫描(高达10kHz),超高X方向分辨率(8μm)。采用两百万像素的高速成像芯片,专属优化的光学设计和蓝色激光,意味着扫描高反光物体表面的时候可以获得更非常不错的数据,并实现高重复性。■出厂前预校准,开箱即用■X方向分辨率达8μm■每秒10,000个轮廓,包括三维测量■通过网页浏览器或SDK设置和控制■内置测量工具,无需任何编程■可扩展性,可用GDK和GOMAX3D相机 ,就选苏州虔坤图像技术有限公司,欢迎客户来电!常州共面度检测3D相机下载
苏州虔坤图像技术有限公司是一家专业提供3D相机 的公司,期待您的光临!福州Gocator25303D相机设置
3D线激光轮廓传感器采用激光三角反射原理。首先使用一束激光照射到被测物体表面,反射光经过光学透镜组在感光元件表面形成光斑,不同高度的表面反射形成的光斑位置各不相同。如下图所示,当被检测表面偏高时,测量激光光斑位置会右移;反之,如果被检测表面偏低时,测量激光光斑位置会左移。3D线激光轮廓传感器采用的不是点激光光源,而是一条激光线,测量光激光斑也是一条线,所以俗称线激光。线激光还可以面扫描,快速形成3D轮廓。福州Gocator25303D相机设置
文章来源地址: http://dzyqj.chanpin818.com/jcdl(ic)/zxjic/deta_19650953.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。